-
December 2021
 © Uikyum Kim
© Uikyum Kim
Authors
U. Kim, D. Jung, H. Jeong, J. Park, H.-M. Jung, J. Cheong, H. R. Choi, H. Do, C. ParkInstitution
Ajou University, Suwon, KoreaKorea Institute of Machinery & Materials (KIMM), Daejeon, KoreaKorea University, Sejong, KoreaSungkyunkwan University, Suwon, KoreaSources
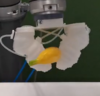
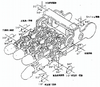
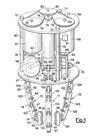
 Integrated linkage-driven dexterous anthropomorphic robotic hand
Integrated linkage-driven dexterous anthropomorphic robotic hand Video: Motions of the ILDA hand Video: Cutting a paper using scissors Video: Handling small objects using tweezers
Video: Motions of the ILDA hand Video: Cutting a paper using scissors Video: Handling small objects using tweezers -
July 2021
 © New Dexterity Research Group
© New Dexterity Research Group
Authors
G. Gao, C.-M. Chang, L. Gerez, M. LiarokapisInstitution
The University of Auckland, Auckland, New ZealandHarvard University, Cambridge, USASources
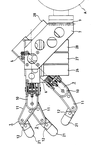
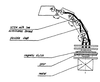
 A Pneumatically Driven, Disposable, Soft Robotic Gripper Equipped with Multi-Stage, Retractable, Telescopic Fingers Video
A Pneumatically Driven, Disposable, Soft Robotic Gripper Equipped with Multi-Stage, Retractable, Telescopic Fingers Video -
July 2021
 © RBO Lab
© RBO Lab
Authors
A. Bhatt, A. Sieler, S. Puhlmann, O. BrockInstitution
Robotics and Biology Laboratory, Technische Universität Berlin (Berlin, Germany)Sources
Surprisingly Robust In-Hand Manipulation: An Empirical Study Video -
May 2021
 © C. Liu
© C. Liu
Authors
C. Liu, S.J. Wohlever, M.B. Ou, T. Padir, S.M.FeltonInstitution
Department of Electrical and Computer Engineering, University of California, Los Angeles, USADepartment of Mechanical and Industrial Engineering, Northeastern University, Boston, USAInstitute for Experiential Robotics, Northeastern University, Boston, USASources
Shake and Take: Fast Transformation of an Origami Gripper Video -
April 2021
 © Khalifa University of Science and Technology
© Khalifa University of Science and Technology
Authors
A.T. Mathew, I. Hussain, C. Stefanini, I. M. Ben Hmida, F. RendaInstitution
Khalifa University of Science and Technology, Abu Dhabi, UAE -
March 2021
 © University of Pennsylvania
© University of Pennsylvania
Authors
J. McWilliams, Y. Yuan, J. Friedman, and C. SungInstitution
University of Pennsylvania, USASources
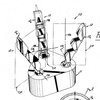
Push-On Push-Off: A Compliant Bistable Gripper with Mechanical Sensing and Actuation Video -
2020
-
December 2020
 © Korea Institute of Machinery and Materials
© Korea Institute of Machinery and Materials
Authors
J.-Y. Lee, Y.-S. Seo, C. Park, J.-S. Koh, U. Kim, J. Park, H. Rodrigue, B. Kim, S.-H. SongInstitution
Department of Robotics and Mechatronics, Korea Institute of Machinery and Materials, Daejeon, South KoreaSchool of Mechanical Engineering, Sungkyunkwan University, Suwon, South Korea -
September 2020
 © Beihang University
© Beihang University
Authors
Y. Hao, S. Biswas, E. Wright Hawkes, T. Wang, M. Zhu, L. Wen, Y. VisellInstitution
Beihang University, Beijing, ChinaEcole Polytechnique Fédérale de Lausanne, Lausanne, SwitzerlandUniversity of California, Santa Barbara, USA -
May 2020
 © Stanford University
© Stanford University
Authors
S. Yuan, A. Epps, J. Nowak, J. K. SalisburyInstitution
Stanford University, CA, USASources
Design of a Roller-Based Dexterous Hand for Object Grasping and Within-Hand Manipulation Presentation at ICRA 2020 Project Website Interview with Shenli Yuan -
April 2020
 © Stanford University
© Stanford University
Authors
S. Yuan, L. Shao, C. L. Yako, A. Gruebele, J. K. SalisburyInstitution
Stanford University, CA, USASources
Design and Control of Roller Grasper V2 for In-Hand Manipulation Project Website Video -
March 2020
 © Italian Institute of Technology
© Italian Institute of Technology
Authors
A. S. Ciullo, J. M. Veerbeek, E. Temperli, A. R. Luft, F. J. Tonis, C. J.W. Haarman, A. Ajoudani, M. G. Catalano, J. P.O. Held, A. BicchiInstitution
Italian Institute of Technology (IIT), Genoa, ItalyDepartment for Clinical Neurosciences and Preventive Medicine, Danube University Krems, Krems an der Donau, AustriaDepartment of Neurology, Division of Vascular Neurology and Neurorehabilitation, University of Zurich, Zürich, SwitzerlandHankamp Rehab, Enschede, The NetherlandsSources
A Novel Soft Robotic Supernumerary Hand for Severely Affected Stroke Patients -
February 2020
 © University of Naples Federico II
© University of Naples Federico II
Authors
H. Liu, L. Zhao, B. Siciliano, F. FicucielloInstitution
Interdepartmental Center for Advances in Robotic Surgery (ICAROS Center), University of Naples Federico II, Naples, ItalySources
Modeling, Optimization, and Experimentation of the ParaGripper for In-Hand Manipulation Without Parasitic Rotation Video -
January 2020
 © Case Western Reserve University
© Case Western Reserve University
Authors
K. Lee, Y. Wang, C. ZhengInstitution
Department of Mechanical and Aerospace Engineering, Case Western Reserve University, Cleveland, OH, USASources
TWISTER Hand: Underactuated Robotic Gripper Inspired by Origami Twisted Tower Video of OrigamiBot -
January 2020
 © IRIM Lab Koreatech
© IRIM Lab Koreatech
-
2019
-
December 2019
 © The University of Electro-Communications
© The University of Electro-Communications
Authors
T. Shimura, Y. Murai, S. Togo, J. Yinlai, H. YokoiInstitution
The University of Electro-Communications, Mechanical Engineering and Intelligent Systems, Tokyo, JapanSources
Lightweight 10-DOF Robotic Hand With Built-In Wire-Driven Mechanism -
November 2019
 © Arizona State University
© Arizona State University
Authors
P. H. Nguyen, F. Lopez-Arellano, W. Zhang, P. PolygerinosInstitution
Arizona State University, Polytechnic School Ira A. Fulton Schools of Engineering, Mesa, AZ, USA, 85212 -
October 2019
 © Yokohama National University
© Yokohama National University
Authors
Y. Anzai, Y. Sagara, R. Kato, M. MukaiInstitution
Yokohama National University, Graduate school of Engineering, Yokohama, JapanTokai University Hachioji Hospital, Department of Surgery, Tokyo, JapanSources
Development of a foldable five-finger robotic hand for assisting in laparoscopic surgery -
October 2019
 © H. Liu
© H. Liu
Authors
H. Liu, P. Ferrentino, S. Pirozzi, B. Siciliano, F. FicucielloSources
The PRISMA Hand II: A Sensorized Robust Hand for Adaptive Grasp and In-Hand Manipulation Video -
July 2019
 © IRIM Lab Koreatech
© IRIM Lab Koreatech
Authors
Y. Kim, J. Yoon, Y. SimInstitution
Department of Electronic Engineering, Korea University of Technology and Education, Cheonan-City, South KoreaSources
Fluid Lubricated Dexterous Finger Mechanism for Human-Like Impact Absorbing Capability Video: FLLEX Hand First Run Video: Payload and Manipulation Test of FLLEX Hand Video: Basic Concept of FLLEX Hand Video: FLLEX Hand V2: Robustness and Payload Test -
July 2019
 © National Taipei University of Technology
© National Taipei University of Technology
Authors
J. Huang, B. Wu, B. ChenInstitution
Institute of Mechatronic Engineering, National Taipei University of Technology, Taipei, Taiwan, R.O.CSources
Seven DOF Three-Finger Robotic Hand with the Pressure/Shear Sensors -
June 2019
 © The Chinese University of Hong Kong
© The Chinese University of Hong Kong
Authors
K. H. L. Heung, Z. Q. Tang, L. Ho, M. Tung, Z. Li, R. K. Y. TongInstitution
Department of Biomedical Engineering, The Chinese University of Hong Kong, Shatin, Hong Kong SARSources
Design of a 3D Printed Soft Robotic Hand for Stroke Rehabilitation and Daily Activities Assistance -
April 2019
 © Artur Vitorio
© Artur Vitorio
Authors
A. V. A. Santos, A. J. AlvaresInstitution
Instituto Federal de Rondônia, Porto Velho, RO, Brazil and University of Brasilia, Brasilia, DF, BrazilSources
Development of an anthropomorphic robotic hand with tactile perception Video -
April 2019
 © Universidad Católica del Perú
© Universidad Católica del Perú
Authors
V. E. Abarca, K. M. Flores, D. ElíasInstitution
Laboratory of Biomechanics and Applied Robotics Pontificia, Universidad Católica del Perú, Lima, PerúSources
The Octa Hand: An Affordable Multi-Grasping 3D-Printed Robotic Prosthesis for Transradial Amputees Video of the Octa Hand -
March 2019
 © National Institute of Technology, Rourkela
© National Institute of Technology, Rourkela
Authors
G. B. Mahanta, A. Rout, B. B. V. L. Deepak, B. B. Biswal, B. M. GunjiInstitution
Department of Industrial Design, National Institute of Technology, Rourkela, India -
2018
-
December 2018
 © Osaka University
© Osaka University
Authors
J. C. Triyonoputro, W. Wan, K. Akanesuvan, K. HaradaInstitution
Graduate School of Engineering Science, Osaka University, JapanSources
A Double-jaw Hand that Mimics A Mouth of the Moray Eel -
November 2018
 © Tsinghua University
© Tsinghua University
Authors
W. Song, W. ZhangInstitution
Tsinghua University, Beijing, ChinaSources
The CPAM Hand: Coupling-Parallel-Adaption Merged Robot Hand -
October 2018
 © Shenzhen Institutes of Advanced Technology
© Shenzhen Institutes of Advanced Technology
Authors
Y. Zheng, X. Li, L. Tian, G. LiInstitution
CAS Key Laboratory of Human-Machine Intelligence-Synergy Systems, Shenzhen Institutes of Advanced Technology, Chinese Academy of Sciences -
October 2018
 © Qilu University of Technology
© Qilu University of Technology
Authors
X. Wang, Y. Zhao, Y. Xiao, Y. Zhu, Y. WangInstitution
Shandong Academy of Sciences, Shandong Provincial Key Laboratory of Robot and Manufacturing Automation Technology, Institute of Automation, Qilu University of Technology, Jinan, 250014, ChinaSources
Design of a Underactuated Robotic Hand with Three Articulated Fingers -
October 2018
 © German Aerospace Center (DLR), Institute of Robotics and Mechatronics
© German Aerospace Center (DLR), Institute of Robotics and Mechatronics
Authors
W. Friedl, H. Höppner, F. Schmidt, M. A. Roa, M. GrebensteinInstitution
German Aerospace Center (DLR), Institute of Robotics and Mechatronics, Wessling, Germany -
October 2018
 © German Aerospace Center (DLR), Institute of Robotics and Mechatronics
© German Aerospace Center (DLR), Institute of Robotics and Mechatronics
Authors
W. Friedl, H. Höppner, F. Schmidt, M. A. Roa, M. GrebensteinInstitution
German Aerospace Center (DLR), Institute of Robotics and Mechatronics, Wessling, Germany -
June 2018
 © The University of Hong Kong
© The University of Hong Kong
Authors
J. Zhou, J. Yi, X. Chen, Z. Liu, Z. WangInstitution
University of Hong KongSources
BCL-13: A 13-DOF Soft Robotic Hand for Dexterous Grasping and In-Hand Manipulation -
2017
-
December 2017
Authors
H. Hu, W. Zhang, X. XuInstitution
Dept. of Mechanical Engineering, Tsinghua University, Beijing, ChinaSources
GSR hand: Linear-parallel and self-adaptive hand with gear and sliding-rod mechanisms -
September 2017
 © Kanazawa University
© Kanazawa University
Authors
W. Wu, Y. Suzuki, T. Tsuji, T. WatanabeInstitution
Faculty of Mechanical Engineering, Institute of Science and Engineering, Kanazawa University, Kakuma-machi, Kanazawa, Japan -
July 2017
 © Tufts University
© Tufts University
Authors
W. Crooks, S. Rozen-Levy, B. Trimmer, C. Rogers, W. MessnerInstitution
Tufts University, Medford, MA, USASources
Passive gripper inspired by Manduca sexta and the Fin Ray® Effect -
May 2017
 © Tuomas Wiste
© Tuomas Wiste
Authors
T. Wiste, M. GoldfarbInstitution
ELI Beamlines Project, Institute of Physics of the Czech Academy of Sciences, 5. května 835 252 41 Dolní Břežany Czech RepublicDepartment of Mechanical Engineering, Vanderbilt University, Nashville, TN 37240 USASources
Design of a simplified compliant anthropomorphic robot hand Video -
April 2017
 © Robotics Laboratory, NAIST
© Robotics Laboratory, NAIST
Authors
F.v. Drigalski, D. Yoshioka, W. Yamazaki, S.G. Cho, M. Gall, P.M.U. Eljuri, V. Hoerig, M. Ding, J. Takamatsu, T. Ogasawara, J. BeltranInstitution
Robot. Lab., Nara Inst. of Sci. & Technol., Nara, JapanDept. of Mech. Sc. & Eng., Nagoya Univ. Furo, Nagoya, JapanSources
NAIST Openhand M2S: A Versatile Two-Finger Gripper Adapted for Pulling and Tucking Textile -
March 2017
 © Dalian University
© Dalian University
Authors
L. Wen, Y. Li, M. Cong, H. Lang, Y. DuInstitution
Dalian University of Technology (Dalian, China)Sources
Design and Optimization of a Tendon-Driven Robotic Hand -
January 2017
 © Seokhwan Jeong
© Seokhwan Jeong
Authors
S. H. Jeong, K.-S. Kim, S. KimInstitution
Mechanical Engineering Department, Korea Advanced Institute of Science and Technology, Daejeon, South KoreaSources
Designing Anthropomorphic Robot Hand With Active Dual-Mode Twisted String Actuation Mechanism and Tiny Tension Sensors Video Video Video of PhD summary -
January 2017
 © IRIM Lab Koreatech
© IRIM Lab Koreatech
Authors
Sources
Video -
2016
-
August 2016
 © D. Liang
© D. Liang
Authors
D. Liang, J. Song, W. Zhang, Z. Sun, Q. ChenInstitution
Department of Mechanical Engineering, Tsinghua University, Beijing, ChinaSources
PASA Hand: A Novel Parallel and Self-Adaptive Underactuated Hand With Gear-Link Mechanisms PASA Finger: A Novel Parallel and Self-Adaptive Underactuated Finger With Pinching and Enveloping Grasp Video -
June 2016
 © Faisal Lab
© Faisal Lab
Authors
C. Konnaris, C. Gavriel, A.A.C. Thomik, A.A. FaisalInstitution
Imperial College LondonSources
EthoHand: A Dexterous Robotic Hand With Ball-Joint Thumb Enables Complex In-Hand Object Manipulation Video -
June 2016
 © Yale University
© Yale University
Authors
N. Rojas, R.R. Ma, A.M. DollarInstitution
Department of Mechanical Engineering and Materials Science, Yale University, New Haven, CT, USASources
The GR2 Gripper: An Underactuated Hand for Open-Loop In-Hand Planar Manipulation -
June 2016
 © Istituto di BioRobotica
© Istituto di BioRobotica
Authors
M. Controzzi, F. Clemente, D. Barone, A. Ghionzoli, C. CiprianiInstitution
Scuola Superiore Sant’Anna, The BioRobotics Institute, Pisa, ItalySources
The SSSA-MyHand: A Dexterous Lightweight Myoelectric Hand Prosthesis Video -
March 2016
 © Wyss Institute
© Wyss Institute
Authors
K.C. Galloway, K.P. Becker, B. Phillips, J. Kirby, S. Licht, D. Tchernov, R.J. Wood, D.F. GruberInstitution
Wyss Institute for Biologically Inspired Engineering, Harvard University, Cambridge, Massachusetts.Department of Ocean Engineering, University of Rhode Island, Narragansett, Rhode Island.Leon Charney School of Marine Sciences, Haifa University, Haifa, IsraelDepartment of Natural Sciences, Baruch College, City University of New York, New York, New York.Sources
Soft Robotic Grippers for Biological Sampling on Deep Reefs Video -
2015
-
November 2015
 © softhands.eu
© softhands.eu
Authors
C. Della Santina, G. Grioli, M. G. Catalano, A. Brando, A. BicchiInstitution
Research Center Enrico Piaggio, University of Pisa, Pisa, ItalyDepartment of Advanced Robotics, Istituto Italiano di Tecnologia, Genova, ItalySources
Dexterity Augmentation on a Synergistic Hand: The Pisa/IIT SoftHand+ Website Video -
October 2015
 © Birglen
© Birglen
Authors
L. BirglenInstitution
Polytechnique MontréalSources
Enhancing Versatility and Safety of Industrial Grippers With Adaptive Robotic Fingers Video -
October 2015
 © SoftBionics
© SoftBionics
Authors
M. Tavakoli, R. Batista and L. SgrignaInstitution
Institute of Systems and Robotics, University of Coimbra, 3030 Coimbra, PortugalSources
The UC Softhand: Light Weight Adaptive Bionic Hand With a Compact Twisted String Actuation System Website Video -
September 2015
 © A. ten Pas
© A. ten Pas
Authors
G. Franchi, A. ten Pas, R. Platt, S. PanzieriInstitution
Department of Mathematics and Computer Science Salisbury University, Salisbury, MD, 21801, USACollege of Computer Science, Northeastern University, Boston, MA, USASources
The Baxter Easyhand: A Robot Hand That Costs $150 US in Parts -
July 2015
 © Yale OpenHand Project
© Yale OpenHand Project
Authors
R. R. Ma, A. Spiers, and A. M. DollarInstitution
Yale University, New Haven, CT 06511, USASources
Website M2 Gripper: Extending the Dexterity of a Simple, Underactuated Gripper Experimentally Driven Design of a Palpating Gripper With Minimally Invasive Surgery Considerations Video -
March 2015
 © Alain Herzog
© Alain Herzog
Authors
J. Shintake, S. Rosset, B.E. Schubert, D. Floreano, H. SheaInstitution
Institute of Microengineering Neuchâtel Campus, École Polytechnique Fédérale de Lausanne (EPFL), Neuchâtel, SwitzerlandSources
Versatile Soft Grippers With Intrinsic Electroadhesion Based on Multifunctional Polymer Actuators Video -
2014
-
May 2014
 © Samsung Electronics Co.
© Samsung Electronics Co.
Authors
Y.-J. Kim, Y. Lee, J. Kim, J.-W. Lee, K.-M. Park, K.-S. Roh, J.-Y. ChoiInstitution
Samsung Advanced Institute of Technology, Ki-hung gu, Yong-in si., Kyunggi do, Rep. of KoreaSources
RoboRay hand: A highly backdrivable robotic hand with sensorless contact force measurements Video -
March 2014
 © Schunk
© Schunk
-
February 2014
 © BDML Stanford
© BDML Stanford
Authors
D.M. Aukes, B. Heyneman, J. Ulmen, H. Stuart, M.R. Cutkosky, S. Kim, P. Garcia, A. EdsingerInstitution
Harvard University, Stanford University, SRI International, Meka RoboticsSources
Design and Testing of a Selectively Compliant Underactuated Hand Video -
Sometime in 2014
 © RBO Lab
© RBO Lab
Authors
R. Deimel, O. BrockInstitution
Robotics and Biology Laboratory, Technische Universität Berlin (Berlin, Germany)Sources
Website A Novel Type of Compliant and Underactuated Robotic Hand for Dexterous Grasping -
2013
-
September 2013
 © Tsinghua University
© Tsinghua University
Authors
W. Zhang, Q. Chen, Z. Sun, D. ZhaoInstitution
Dept. of Mech. Eng., Tsinghua University, Beijing, ChinaSources
Under-actuated passive adaptive grasp humanoid robot hand with control of grasping force -
September 2013
 © University Federico II of Naples
© University Federico II of Naples
Authors
C. Rossi, S. Savino, V. Niola, S. TronconeInstitution
University Federico II of NaplesSources
A Study of a Robotic Hand With Tendon Driven Fingers An Underactuated Multi-Finger Grasping Device Performance Comparison Between FEDERICA Hand and LARM Hand -
July 2013
 © Yale OpenHand Project
© Yale OpenHand Project
Authors
L. U. Odhner, R. R. Ma, A. M. DollarInstitution
Department of Mechanical Engineering and Materials Science, Yale University, New Haven, CT, USASources
Website Open-Loop Precision Grasping With Underactuated Hands Inspired by a Human Manipulation Strategy Exploring Dexterous Manipulation Workspaces With the iHY Hand Video -
May 2013
 © Yale OpenHand Project
© Yale OpenHand Project
Authors
R. R. Ma, L. U. Odhner, A. M. DollarInstitution
Department of Mechanical Engineering and Materials Science, Yale University, New Haven, CT, USASources
Website A Modular, Open-Source 3D Printed Underactuated Hand -
January 2013
 © Harvard Biorobotics Lab
© Harvard Biorobotics Lab
Authors
L. U. Odhner, L. P. Jentoft, M. R. Claffee, N. Corson, Y. Tenzer, R. R. Ma, M. Buehler, R. Kohout, R. D. Howe, A. M. DollarInstitution
Dept. of Mechanical Engineering and Materials Science, Yale University, New Haven CTSchool of Engineering and Applied Sciences, Harvard University, Cambridge, MAiRobot Corporation, Bedford, MASources
Website A Compliant, Underactuated Hand for Robust Manipulation Video Website -
January 2013
 © Yale OpenHand Project
© Yale OpenHand Project
Authors
L.U. Odhner, L.P. Jentoft, M.R. Claffee, N. Corson, Y. Tenzer, R.R. Ma, M. Buehler, R. Kohout, R.D. Howe, and A.M. DollarInstitution
Dept. of Mechanical Engineering and Materials Science, Yale University, New Haven CTSchool of Engineering and Applied Sciences, Harvard University, Cambridge, MAiRobot Corporation, Bedford, MASources
Website A Compliant, Underactuated Hand for Robust Manipulation -
January 2013
 © Techno Concept
© Techno Concept
-
January 2013
 © RBO Lab
© RBO Lab
Authors
R. Deimel, O. BrockInstitution
Robotics and Biology Laboratory, Technische Universität Berlin (Berlin, Germany)Sources
Website A Compliant Hand Based on a Novel Pneumatic Actuator -
2012
-
October 2012
 © Willow Garage
© Willow Garage
Authors
M. Ciocarlie, F. Mier Hicks, R. Holmberg, J. Hawke, M. Schlicht, J. Gee, S. Stanford, R. BahadurInstitution
Willow Garage Inc., Menlo Park, CA, USASources
Website The Velo Gripper: A Versatile Single-Actuator Design for Enveloping, Parallel and Fingertip Grasps Website Video Video -
October 2012
 © University of Pisa
© University of Pisa
Authors
V. Tincani, M. G. Catalano, E. Farnioli, M. Garabini, G. Grioli, G. Fantoni, A. BicchiInstitution
Research Center “E. Piaggio”, University of PisaSources
Velvet Fingers: A Dexterous Gripper With Active Surfaces Velvet Fingers: Grasp Planning and Execution for an Underactuated Gripper With Active Surfaces Video Video Video -
June 2012
 © University of Bologna
© University of Bologna
Authors
G. Palli, C. Melchiorri, G. Vassura, , U. Scarcia, L. Moriello, G. Berselli, A.Cavallo, G. De Maria, C. Natale, S. Pirozzi, C. May, F. Ficuciello, B. SicilianoSources
Innovative Technologies for the Next Generation of Robotic Hands Development of the UB Hand IV: Overview of Design Solutions and Enabling Technologies The DEXMART Hand: Mechatronic Design and Experimental Evaluation of Synergy-Based Control for Human-Like Grasping Experimental Evaluation of Postural Synergies During Reach to Grasp With the UB Hand IV Development of Robotic Hands: The UB Hand Evolution Video -
January 2012
 © Festo
© Festo
Authors
Sources
Website -
January 2012
 © Festo
© Festo
-
January 2012
 © Sandia National Labs
© Sandia National Labs
Authors
M. Quigley, C. Salisbury, A.Y. Ng, K. SalisburyInstitution
Open Source Robotics Foundation, Mountain View, CA, USASRI International, Menlo Park, CA, USAComputer Science Department, Stanford University, CA, USASources
Mechatronic Design of an Integrated Robotic Hand Website Video -
January 2012
 © Lacquey
© Lacquey
Authors
Lacquey Robot Grasping Solutions (Martijn Wisse et al.)Sources
Website -
January 2012
 © Kinova
© Kinova
Authors
Kinova RoboticsSources
Website -
Sometime in 2012
 © Agnese Abrusci - Istituto Italiano di Tecnologia
© Agnese Abrusci - Istituto Italiano di Tecnologia
Authors
M. G. Catalano, G. Grioli, A. Serio, E. Farnioli, C. Piazza, A. BicchiInstitution
Centro Interdipartimentale di Ricerca “E. Piaggio”, Università di Pisa, ItalySources
Website Adaptive Synergies for a Humanoid Robot Hand -
2011
-
September 2011
 © Columbia University
© Columbia University
Authors
L. Wang, J. DelPreto, S. Bhattacharyya, J. Weisz, P.K. AllenInstitution
Columbia UniversitySources
A Highly-Underactuated Robotic Hand With Force and Joint Angle Sensors -
September 2011
 © Department of Mechanical Engineering, Tsinghua University
© Department of Mechanical Engineering, Tsinghua University
Authors
G. Li, H. Liu, W. ZhangInstitution
Department of Mechanical Engineering, Tsinghua University, Beijing, ChinaSources
Development of multi-fingered robotic hand with coupled and directly self-adaptive grasp -
September 2011
 © Festo
© Festo
-
May 2011
 © Robotiq
© Robotiq
Authors
Sources
Website -
January 2011
 © DLR
© DLR
Authors
Institution
Inst. of Robotics & Syst. Dynamics, German Aerospace Centre, Wessling, GermanySources
Website -
January 2011
 © Whitesides Research Group
© Whitesides Research Group
Authors
F. Ilievski, A.D. Mazzeo, R.F. Shepherd, X. Chen, G.M. WhitesidesInstitution
Whitesides Research Group, Harvard University (Cambridge, USA)Sources
Website “Soft Robotics for Chemists -
January 2011
 © Italian Institute of Technology
© Italian Institute of Technology
Authors
A. Schmitz, U. Pattacini, F. Nori, L. Natale, G. Metta, G. SandiniInstitution
Italian Institute of Technology, 16163 Genova, ItalySources
Design, Realization and Sensorization of the Dexterous iCub Hand -
January 2011
 © ITK
© ITK
-
January 2011
 © F. Kikou
© F. Kikou
Authors
F. KikouSources
Website -
2010
-
May 2010
 © Willow Garage
© Willow Garage
-
March 2010
 © Cornell CCSL
© Cornell CCSL
Authors
E. Brown, N. Rodenberg, J.R. Amend, A. Mozeika, E. Steltz, M.R. Zakin, H. Lipson, H.M. JaegerInstitution
James Franck Institute and Department of Physics, University of Chicago, Chicago, IL 60637School of Mechanical and Aerospace Engineering, Cornell University, Ithaca, NY 14853Robot G and I Research, Bedford, MA 01730Defense Advanced Research Projects Agency, 3701 North Fairfax Drive, Arlington, VA 22203Sources
Website Universal Robotic Gripper Based on the Jamming of Granular Material A Positive Pressure Universal Gripper Based on the Jamming of Granular Material Video -
January 2010
 © iRobot
© iRobot
Authors
BrownSources
Website -
2009
-
November 2009
 © Kobe University
© Kobe University
Authors
W. Fukui, F. Kobayashi, F. Kojima, H. Nakamoto, T. Maeda, N. Imamura, K. Sasabe, H. ShirasawaInstitution
KOBE UNIVERSITY 1-1 Rokkodai-cho, Nada-ku, KOBE, 657-8501, JapanHyogo Prefectural Institute of TechnologyMaeda Precision Manufacturing Limited KobeHiroshima International UniversityThe Kansai Electiric Power Co., IncThe Advanced Materials Processing Institute Kinki JapanSources
Development of Multi-Fingered Universal Robot Hand With Torque Limiter Mechanism -
October 2009
 © Meka Robotics
© Meka Robotics
-
April 2009
 © KIT Karlsruhe Institute of Technology
© KIT Karlsruhe Institute of Technology
Authors
I. N. Gaiser, C. Pylatiuk, S. Schulz, A. Kargov, R. Oberle, T. WernerSources
The FLUIDHAND III: A multifunctional Prosthetic Hand An earlier version (2004): https://www.iai.kit.edu/1717.php -
February 2009
 © Elumotion Ltd.
© Elumotion Ltd.
The successor of this hand - The Elumotion Hand 2 - is marketed as the <a target='_blank' href='#Schunk Servo-electric 5-Finger Gripping Hand (SVH)'>Schunk Servo-electric 5-Finger Gripping Hand - SVH</a>.
Authors
Institution
Elumotion Ltd.Sources
Website -
Sometime in 2009
 © Sugano Lab, Waseda University
© Sugano Lab, Waseda University
Authors
H. Iwata, S. SuganoInstitution
Sugano Laboratory, Waseda University (Tokyo, Japan)Sources
Website Design of Human Symbiotic Robot TWENDY-ONE A Motion Control for Dexterous Manipulation With Human Mimetic Hand-Arm System Video -
2008
-
December 2008
 © I. Gaiser
© I. Gaiser
Authors
I. Gaiser, S. Schulz, A. Kargov, H. Klosek, A. Bierbaum, C. Pylatiuk, R. Oberle, T. Werner, T. Asfour, G. Bretthauer, R. DillmannInstitution
Karlsruhe Institute of Technology -
October 2008
 © Kyungnam University
© Kyungnam University
Authors
V.Q. Nguyen, S.B. Oh, J.U. Lim, C.H. Kang, S.H. HanInstitution
Kyungnam University (Masan, Korea) -
September 2008
 © D. Ng
© D. Ng
Authors
D. NgSources
Website -
August 2008
 © C. Ristow
© C. Ristow
An 8 meter long hydraulically-actuated arm and hand that preferably crushes cars. It can lift up to 900kg and is controlled by an exoskeleton-like glove device. First shown at Burning Man 2008, the Hand Of Man took 6 months to build and cost around $40k.
Authors
C. RistowSources
Project Website Video Video -
August 2008
 © DLR
© DLR
Authors
H. Liu, K. Wu, P. Meusel, G. Hirzinger, M.H. Jin, Y.W. Liu, S.W. Fan, T. Lan, Z.P. ChenInstitution
DLR German Space AgencyHarbin Institute of TechnologySources
A Dexterous Humanoid Five-Fingered Robotic Hand Multisensory Five-Finger Dexterous Hand: The DLR/HIT Hand II Website -
May 2008
 © University of Cassino
© University of Cassino
Authors
G. Carbone, M. CeccarelliInstitution
University of Cassino (Cassino, Italy)Sources
Design of LARM Hand: Problems and Solutions Performance Comparison Between FEDERICA Hand and LARM Hand -
April 2008
 © Schunk GmbH & Co. KG
© Schunk GmbH & Co. KG
Authors
Sources
Manual: SDH2 - Servo-electric 3-finger gripping hand Data sheet -
2007
-
October 2007
 © C. Y. Brown
© C. Y. Brown
Authors
C. Y. Brown, H. H. AsadaInstitution
Massachusetts Institute of Technology (Cambridge, USA) -
October 2007
 © Dong-Eui University
© Dong-Eui University
Authors
S. Jung, S. Kang, M. Lee, I MoonInstitution
Dong-Eui University (Pusan, Korea)Sources
Design of Robotic Hand With Tendon-Driven Three Fingers -
July 2007
 © Touch Bionics
© Touch Bionics
-
Sometime in 2007
 © KTH Royal Institute of Technology
© KTH Royal Institute of Technology
-
January 2007
 © Hiroshi Yokoi
© Hiroshi Yokoi
Authors
C. S. Loh, H. Yokoi, T. AraiSources
Website New Shape Memory Alloy Actuator: Design and Application in the Prosthetic Hand -
2006
-
Sometime in 2006
 © M.C. Carrozza
© M.C. Carrozza
Authors
Carrozza et al.Sources
Website -
Sometime in 2006
 © Biorobotics Laboratory, Harvard University
© Biorobotics Laboratory, Harvard University
Authors
A.M. Dollar, R.D. HoweInstitution
Biorobotics Laboratory, Harvard University (Cambridge, USA)Sources
Website -
2005
-
April 2005
 © Keio University
© Keio University
Authors
I. Yamano, Y. Kamikawa, T. MaenoInstitution
Keio University (Yokohama, Japan)Sources
Five-fingered Robot Hand using Ultrasonic Motors and Elastic Elements Underactuated Five-Finger Prosthetic Hand Inspired by Grasping Force Distribution of Human -
January 2005
 © Instituto de Automatica Industrial, CSIC
© Instituto de Automatica Industrial, CSIC
Authors
J.L. Pons, E. Rocon, R. Ceres, D. Reynaerts, B. Saro, S. Levin, W. Van MoorleghemInstitution
Consejo Superior de Investigaciones Cient ́ıficas, Arganda del Rey, SpainKatholieke Universiteit Leuven, BelgiumCentro de Recuperaci ́on de Minusvalidos F ́ısicos, IMSERSO, SpainAlorman Advanced Medical Technologies Ltd., IsraelAdvanced Material Technologies N.V., BelgiumSources
The MANUS-HAND Dextrous Robotics Upper Limb Prosthesis: Mechanical and Manipulation Aspects Mechanical design and performance specifications of anthropomorphic prosthetic hands: A review -
2004
-
April 2004
 © University of Bologna
© University of Bologna
Authors
F. Lotti, P. Tiezzi, G. Vassura, L. Biagiotti, C. MelchiorriInstitution
DIEM, Bologna Univ., ItalyUniversity of Modena and Reggio Emilia, Modena, ItalySources
UBH 3: An Anthropomorphic Hand With Simplified Endo-Skeletal Structure and Soft Continuous Fingerpads Website Development of UB Hand 3: Early Results Video -
Sometime in 2004
 © M.C. Carrozza
© M.C. Carrozza
Authors
M.C. Carrozza, C. Supppo, F. Sebastiani, B. Massa, F. Vecchi, R. Lazzarini, M.R. Cutkosky, P. DarioInstitution
ARTS Lab, Scuola Superiore Sant'Anna, Polo Sant'Anna Valdera, viale Rinaldo Piaggio, 34, 56025 Pontedera (PI), ItalyCentro INAIL RTR, via Vetraia, 7, 55049 Viareggio (LU), ItalyDesign Division, Department of Mechanical Engineering, Stanford UniversitySources
The SPRING Hand: Development of a Self-Adaptive Prosthesis for Restoring Natural Grasping Website -
January 2004
 © A.D. Deshpande
© A.D. Deshpande
Authors
A.D. Deshpande, Z. Xu, M.J. Vande Weghe, B.H. Brown, J. Ko, L.Y. Chang, D.D. Wilkinson, S.M. Bidic, M. Rogers, M. Weissert, Y. MatsuokaInstitution
Carnegie Mellon University (Pittsburgh, USA)University of Washington (Seattle, USA)University of Texas (Austin, USA)Sources
Website Website The ACT Hand: Design of the Skeletal Structure Mechanisms of the Anatomically Correct Testbed Hand Development of an Anatomically Correct Testbed (ACT) Hand Anatomically Correct Testbed Hand Control: Muscle and Joint Control Strategies -
Sometime in 2004
 © DLR
© DLR
-
2003
-
January 2003
 © Kaneko Higashimori Laboratory
© Kaneko Higashimori Laboratory
Authors
M. Kaneko, M. Higashimori, R. Takenaka, A. Namiki, M. IshikawaInstitution
Kaneko Higashimori Laboratory, Osaka UniversitySources
Website The 100G capturing robot — Too fast to see Design of the 100G capturing robot based on dynamic preshaping -
2002
-
October 2002
 © Gifu University
© Gifu University
Authors
T. Mouri, H. Kawasaki, K. Yoshikawa, J. Takai, S. ItoInstitution
Gifu University (Gifu, Japan) -
August 2002
 © M.C. Carrozza
© M.C. Carrozza
Authors
M.C. Carrozza, B. Massa, S. Micera, R. Lazzarini, M. Zecca, P. DarioInstitution
Arts/Crim Labs, Scuola Superiore Sant'Anna, (Pisa, Italy)Sources
The Development of a Novel Prosthetic Hand - Ongoing Research and Preliminary Results -
May 2002
 © Sungkyunkwan University
© Sungkyunkwan University
Authors
T. Kang, H. Choi, M. KimInstitution
Sungkyunkwan University (Seoul, Korea)Sources
Development of Anthropomorphic Robot Hand SKK Robot Hand I Website -
May 2002
 © M.C. Carrozza
© M.C. Carrozza
Authors
B. Massa, S. Roccella, M.C. Carrozza, P. DarioInstitution
ARTS/Mitech Laboratories (Pisa, Italy)Sources
Design and development of an underactuated prosthetic hand Experimental Analysis of an Innovative Prosthetic Hand With Proprioceptive Sensors -
Sometime in 2002
 © Shadow Robot Company Ltd.
© Shadow Robot Company Ltd.
-
2001
-
September 2001
 © University of Malta
© University of Malta
Authors
C.M. Seguna, M.A. SalibaInstitution
Dept. of Manuf. Eng., Univ. of Malta, MaltaSources
The Mechanical and Control System Design of a Dexterous Robotic Gripper -
May 2001
 © DLR
© DLR
Authors
J. Butterfass, M. Grebenstein, H. Liu, G. HirzingerInstitution
Inst. of Robotics & Syst. Dynamics, German Aerospace Centre, Wessling, GermanySources
Website DLR-Hand II: Next generation of a Dextrous Robot Hand DLR Hand II: Experiments and Experience with an Anthropomorphic Hand Data Sheet of DLR Hand II -
May 2001
 © Université de Poitiers
© Université de Poitiers
Authors
J.P. Gazeau, S. Zehloul, M. Arsicault, J.P. LallemandInstitution
Lab. de Mecanique des Solides, Poitiers Univ., FranceSources
The LMS Hand: Force and Position Controls in the Aim of the Fine Manipulation of Objects -
May 2001
 © S. Schulz
© S. Schulz
Authors
S. Schulz, C. Pylatiuk, G. BretthauerInstitution
University of Karlsruhe (Karlsruhe, Germany) -
May 2001
 © G. Vassura and C. Melchiorri
© G. Vassura and C. Melchiorri
Authors
L. Biagiotti, C. Melchiorri, G. VassuraInstitution
University of Bologna (Bologna, Italy)Sources
Control of a Robotic Gripper for Grasping Objects in No-Gravity Conditions. -
May 2001
 © Beijing University of Aeronautics and Astronautics
© Beijing University of Aeronautics and Astronautics
Authors
Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang, W. Guo, W.A. GruverInstitution
Beijing University of Aeronautics and Astronautics (Beijing, China) -
2000
-
December 2000
 © University of Southampton
© University of Southampton
Authors
C.M. Light, P.H. ChappellInstitution
University of Southampton (Southampton, UK)Sources
Development of a lightweight and adaptable multiple-axis hand prosthesis Website Website -
May 2000
 © Université Laval
© Université Laval
Authors
T. Lalibert́é, C.M. GosselinInstitution
Université Laval (Quebec, Canada)Sources
Website Actuation System for Highly Underactuated Gripping Mechanism. US Patent No. 6 505 870 Video Website Website -
1999
-
December 1999
 © University of Toronto
© University of Toronto
Authors
N. Dechev, W.L. Cleghorn, S. NaumannInstitution
Department of Mechanical and Industrial Engineering, University of TorontoSources
Multi-Segmented Finger Design of an Experimental Prosthetic Hand Multiple finger, passive adaptive grasp prosthetic hand Presentation Slides: TBM Hand: Multi-Fingered, Adaptive Grasp Prosthetic Hand: Better Function and Cosmesis -
May 1999
 © I.D. Walker
© I.D. Walker
Authors
A.M. Ramos, I.A. Gravagne, I.D. WalkerInstitution
Dept. of Electr. & Comput. Eng., Clemson Univ., SC, USASources
Goldfinger: A Non-Anthropomorphic, Dextrous Robot Hand -
Sometime in 1999
 © NASA
© NASA
Authors
C.S. Lovhik, M.A. DiftlerSources
Website -
1998
-
May 1998
 © DLR
© DLR
Authors
G. Hirzinger, J. Butterfaß, S. Knoch, H. LiuInstitution
Inst. of Robotics & Syst. Dynamics, German Aerospace Centre, Wessling, GermanySources
Website DLR's Multisensory Articulated Hand: I. Hard- And Software Architecture DLR's Multisensory Articulated Hand -
1997
-
December 1997
 © J.B.C. Davies
© J.B.C. Davies
Authors
D.M. Lane, J.B.C. Davies, G. Casalino, G. Bartolini, G. Cannata, G. Veruggio, M. Canals, C. Smith, D.J. O’Brien, M. Pickett, G. Robinson, D. Jones, E. Scott, A. Ferrara, D. Angelleti, M. Coccoli, R. Bono, P. Virgili, R. Pallas, E. GraciaInstitution
Dept. of Comput. & Electr. Eng., Heriot-Watt Univ., Edinburgh, UKSources
Advanced Manipulation for Deep Underwater Sampling The Amadeus Project: An Overview -
September 1997
 © Genoa Robotics And Automation Laboratory (GRAAL)
© Genoa Robotics And Automation Laboratory (GRAAL)
Authors
A. Caffaz, S. Bernieri, G. Cannata, G. Casalino, G. Panin, E. MassuccoSources
The DIST-Hand Robot The Design and Development of the DIST-Hand Dextrous Gripper Website Underactuated Mechanical Finger With Return Actuation US Patent No. 5,762,390 Video -
April 1996
 © National Taiwan University
© National Taiwan University
Authors
L.R. Lin, H.P. HuangInstitution
National Taiwan University -
Sometime in 1996
 © MIT Artificial Intelligence Laboratory
© MIT Artificial Intelligence Laboratory
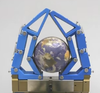
The active DOFs also include a wrist roll joint.
Authors
D. A. Theobald, W. J. Hong, A. Madhani, B. Hoffman, G. Niemeyer, L. Cadapan, J.-J. Slotine, K. SalisburyInstitution
MIT Artificial Intelligence Laboratory, Cambridge, USASources
Autonomous Rock Acquisition -
Sometime in 1996
 © Northeastern University
© Northeastern University
Authors
J.D. Crisman, C. Kanojia, I. ZeidInstitution
Dept. of Electr. & Comput. Eng., Northeastern Univ., Boston, MA, USASources
Graspar: A Flexible, Easily Controllable Robotic Hand Website -
1995
-
May 1995
 © Courant Institute, New York University
© Courant Institute, New York University
Authors
M. Ebner, R.S. WallaceInstitution
Courant Institute, New York University -
March 1995
 © T. Okada
© T. Okada
Authors
T. Okada, P. RosaInstitution
Information Engineering Department, Niigata University, 950-21 Niigata-shi, Ikarashi 2-8050, JapanSources
On the Design of a 'Scrollic' Gripper for Firm 3D Grasping 3-D Firm Grasps With the SCROLLIC Gripper -
March 1995
 © PERCO Laboratory
© PERCO Laboratory
Authors
M. Bergamasco, S. Scattareggia Marchese, P.J. Kyberd, O.E. Holland, P.H. Chappell, S. Smith, R. Tregidgo, P.J. Bagwell, M. SnaithInstitution
S.M. Scienzia Machinale, Pisa, ItalyOxford Orthopaedic Engineering Centre, Oxford, UKUniversity of West of England, Bristol, UKUniversity of Southampton, Southampton, UKSources
MARCUS: a two degree of freedom hand prosthesis with hierarchical grip control The mechanical design of the MARCUS prosthetic hand -
1993
-
October 1993
 © Wim Jongkind
© Wim Jongkind
Authors
W. JongkindInstitution
Delft Univ. of Technol., NetherlandsSources
Thesis: Dextrous gripping in a hazardous environment Dextrous Gripping in a Hazardous Environment: Guidelines, Fault Tolerance and Control -
September 1993
Authors
R. Menzel, K. Woelfl, F. PfeifferInstitution
University Muenchen, GermanySources
The development of a hydraulic hand Grasping with a dextrous robotic hand Grasp Strategies for a Dextrous Robotic Hand -
July 1993
 © Toshiba
© Toshiba
Authors
H. Hashimoto, H. Ogawa, M. Obama, T. Umeda, K. Tatuno, T. FurukawaSources
Development of a Multi-Fingered Robot Hand With Fingertip Tactile Sensors -
May 1993
Authors
M.S. Ali, K.J. Kyriakopoulos, H.E. StephanouInstitution
Rensselaer Polytech. Inst., Troy, NY, USA -
January 1993
 © NASA
© NASA
Was sold on eBay in 2009.
Authors
M. RosheimSources
Website NTRS - NASA Technical Reports Server Video Video -
Sometime in 1993
Authors
H. OdebergSources
Advances in sensor conrolled robotics: Multi-sensor data processing and the Linköping hand -
1992
-
August 1992
Authors
G. Guo, W.A. Gruver, X. Qian -
July 1992
 © University of Bologna
© University of Bologna
Authors
G. Vassura, C. MelchiorriSources
Mechanical and Control Features of the University of Bologna Hand Version 2 Development of Robotic Hands: The UB Hand Evolution -
July 1992
 © Electrotechnical Laboratory
© Electrotechnical Laboratory
Authors
T. Matsui, T. Omata, Y. KuniyoshiSources
Multi-Agent Architecture for Controlling a Multifingered Robot -
July 1992
 © Industrial Products Research Institute, AIST, MITI
© Industrial Products Research Institute, AIST, MITI
Authors
H. Endo, M. WandaSources
Grasping Control of Serial-Link Hand Based on Tactile Sensors -
May 1992
 © JPL
© JPL
Authors
B.M. JauInstitution
Jet Propulsion Laboratory, California Institute of TechnologySources
Man-Equivalent Telepresence Through Four Fingered Human-Like Hand System -
Sometime in 1992
Authors
C. SchwartzingerSources
Strain gauges as sensors for controlling the manipulative robot hand OEDIPUS -
1991
-
November 1991
 © R.M. Crowder
© R.M. Crowder
Authors
R.M. CrowderInstitution
University of Southampton (Southampton, UK) -
1990
-
July 1990
 © Mitsubishi Heavy Ind. Ltd.
© Mitsubishi Heavy Ind. Ltd.
Authors
T. Oomichi, A. Okino, M. Higuchi, A. Maekawa, K. OhnishiInstitution
Mitsubishi Heavy Ind. Ltd., Res. & Dev. Center, Hyogo, JapanSources
Development of Working Multifinger Hand Manipulator Intelligent control of four fingered manipulator system -
July 1990
 © Universität Darmstadt
© Universität Darmstadt
Authors
W. Paetsch, M. KanekoInstitution
Technical University of Darmstadt, GermanyKyushu Institute of Technology, Iizuka, JapanSources
A Three Fingered Multijointed Gripper for Experimental Use Exemplarische Untersuchungen Zu Mehrfingrigen Robotergreifern: Aufbau — Regelung — Systemintegration -
May 1990
 © H. Maekawa
© H. Maekawa
Authors
H. Maekawa, M. KanekoSources
Robot hand with three fingers Development of a Three-Fingered Robot Hand With Stiffness Control Capability -
Sometime in 1990
Authors
R.A. RussellSources
 Robot tactile sensing
Robot tactile sensing -
1989
-
December 1989
 © Toyota
© Toyota
Authors
N. Mimura -
October 1989
 © Y. Maeda
© Y. Maeda
Authors
Y. Maeda, S. Tachi, A. Fujikawa -
January 1989
 © University Leuven
© University Leuven
Authors
H. Van Brussel, B. Santoso, D. ReynaertsSources
Design and Control of a multi-fingered robot hand provided with tactile feedback -
1988
-
October 1988
Authors
K. Yamafuji, T. MaedaSources
Development of a Multiprocessor Controlled Robot Hand -
October 1988
 © Universität Karlsruhe
© Universität Karlsruhe
Authors
T.J. Doll, H.J. SchneebeliInstitution
Institute for Real-Time Computer Control and Robotics, Faculty for Informatics, University of Karlsruhe, Karlsruhe, GermanySources
The Karlsruhe Hand -
Sometime in 1988
 © Bekey
© Bekey
There were three models of this hand with varying numbers of motors.
Authors
R. Tomovic, G. Boni, G. BekeySources
Website An adaptive artificial hand -
Sometime in 1988
 © Barrett Technology
© Barrett Technology
Authors
N. Ulrich, W.T. Townsend -
1987
-
December 1987
 © T. J. Metzner
© T. J. Metzner
Authors
T. J. MetznerInstitution
Oklahoma State University, Stillwater, Oklahoma, USA -
August 1987
 © Odetics Inc.
© Odetics Inc.
-
April 1987
Authors
E.R. Snow, M.C. LeuSources
The design and development of a general purpose gripper -
March 1987
 © University Waseda
© University Waseda
Authors
S. Sugano, I. KatoSources
Website Website WABOT-2: Autonomous Robot With Dexterous Finger-Arm Coordination in Keyboard Performances Video of WABOT-2 playing a keyboard -
Sometime in 1987
 © University Waseda
© University Waseda
Authors
KatoSources
Development of Waseda robot: the study of biomechanisms at Kato laboratory Website Website -
January 1987
 © University of Toronto
© University of Toronto
Authors
J. Kim, D. Blythe, D. Penny, A. GoldenbergInstitution
University of TorontoSources
Computer Architecture and Low Level Control of the PUMA/RAL Hand System: Work in Progress -
1986
-
April 1986
 © University of Utah
© University of Utah
Authors
S. Jacobsen, E. Iversen, D. Knutti, R. Johnson, K. BiggersInstitution
University of Utah -
1985
-
September 1985
Authors
T. Oomichi, T. Miyatake, A. Maekawa, J. NakayamaSources
Analysis and evaluation for fingered manipulators supported by master slave control -
September 1985
Authors
H. Hanafusa, T. Yoshikawa, Y. Nakamura, K. NagaiSources
Structural analysis and robust prehension of robotic hand arm systems -
September 1985
Authors
S.R. Lucas, C.R. Tischler, A.E. Samuel, P.R. RidleyInstitution
Department of Mechanical and Manufacturing Engineering, University of Melbourne, Victoria, AustraliaSources
The Melbourne Hand Kinematics and Torque Control of Multi-Fingered Articulated Robot Hand Mechanics and Control of an Articulated, Multi-fingered Robot Gripper (M.Sc. Thesis by P.R. Ridley) -
June 1985
Authors
P. Chaudhuri, D.H. Fredericksen -
Sometime in 1985
 © Imperial College
© Imperial College
Authors
P.B. ScottInstitution
Imperial College (London, England)Sources
The ‘Omnigripper’: A Form of Robot Universal Gripper -
1984
-
August 1984
Authors
J.C. Guinot, P. Bidaud, J.P. Lallemand -
July 1984
 © Hitachi
© Hitachi
Authors
Y. Nakano, M. Fujie, Y. HosadaSources
Hitachi robot hand -
June 1984
Authors
D.A. Petersen -
Sometime in 1984
 © S. Hirose
© S. Hirose
Authors
S. Hirose, Y. UmetaniInstitution
Department of Physical Engineering, Tokyo Institute of Technology, 2-12-1 Ohokayama, Meguro-ku, Tokyo, JapanSources
The Kinematics and Contorol of a Soft Gripper for the Handling of Living of Fragile Objects -
Sometime in 1984
Authors
M. Caporali, M. ShahinpoorSources
Design and Construction of a 5-Fingered Robotic Hand -
1983
-
September 1983
 © H. Hanafusa
© H. Hanafusa
Authors
H. Hanafusa, H. Kobayashi, K. TerasakiInstitution
University MejiSources
Fine Control of the Object with Articulated Multi-Finger Robot Hands Control and Geometrical Considerations for an Articulated Robot Hand -
August 1983
 © University of Pennsylvania
© University of Pennsylvania
Authors
D. Abramowitz, J. Goodenow, B. PaulSources
Pennsylvania articulated mechanical hand - an end effector to determine shape by touch Feeling by Grasping -
Sometime in 1983
 © K. Salisbury
© K. Salisbury
Authors
K. SalisburySources
Kinematic and Force Analysis of Articulated Hands Video -
Sometime in 1983
Authors
L.D. Lian, S. Peterson, M. DonathInstitution
University Minnesota -
1980
-
September 1980
 © A. Rovetta
© A. Rovetta
Authors
A. Rovetta, I. Franchetti, P. VicentiniInstitution
Politecnico di MilanoSources
Multi-purpose mechanical hand Sensor Controlled Multifunction Robot Hand -
1979
-
Sometime in 1979
 © Electortechnical Laboratory, Japan
© Electortechnical Laboratory, Japan
Authors
T. OkadaSources
Website Computer Control of Multijointed Finger System for Precise Object-Handling Website -
1978
-
December 1978
Authors
H.F.M. Van Der LoosInstitution
Institute of Microtechnique, Swiss Federal Institute of Technology, Switzerland -
Sometime in 1978
 © S. Hirose
© S. Hirose
Authors
S. Hirose, Y. UmetaniInstitution
Department of Physical Engineering, Tokyo Institute of Technology, 2-12-1 Ohokayama, Meguro-ku, Tokyo, JapanSources
-
January 1978
 © Waseda University
© Waseda University
Authors
I. KatoInstitution
Waseda UniversitySources
The Evaluation Method of Rehabilitation Devies -Field Testing of Powered Forearm Prothesis, WIME Hand Kato, Sadamoto: Mechanical Hands Illustrated (page 51) -
1977
-
October 1977
 © Chuo University
© Chuo University
-
October 1977
 © H. Hanafusa
© H. Hanafusa
Authors
H. Hanafusa, H. AsadaSources
Stable Prehension by a Robot With Elastic Fingers A robot hand with elastic figers and its application to assembly process -
Sometime in 1977
 © University Massachusetts
© University Massachusetts
Authors
F.R.E. Crossley, F.G. UmholtzInstitution
Massachusetts Univ., Amherst, MA, United StatesSources
Design for a three-fingered hand -
1976
-
Sometime in 1976
 © S. Hirose
© S. Hirose
Authors
S. Hirose, Y. UmetaniInstitution
Department of Physical Engineering, Tokyo Institute of Technology, 2-12-1 Ohokayama, Meguro-ku, Tokyo, JapanSources
Website The Development of Soft Gripper for the Versatile Robot Hand Video -
1974
-
March 1974
 © F. Skinner
© F. Skinner
Authors
F. SkinnerSources
Multiple prehension hands for assembly robots US Patent No. 3866966 -
1970s
-
Sometime in the 1970s
 © Kumamoto University
© Kumamoto University
Authors
Institution
Kumamoto UniversitySources
Kato, Sadamoto: Mechanical Hands Illustrated (page 52) -
1964
-
Sometime in 1964
 © T. Yamashita
© T. Yamashita
Authors
T. YamashitaSources
Mechanical Fingers Controlled by Machine and Their Applications to Materials Handling -
1962
-
May 1962
 © MIT CSAIL
© MIT CSAIL
Authors
H.A. ErnstInstitution
International Business Machines Corporation, San Jose Research Laboratory, San Jose, CaliforniaSources
MH-1: A Computer Operated Mechanical Hand Ernst Arm-MH-1: A Computer-Controlled Mechanical Hand -
1907
-
Sometime in 1907
 © C. Eppner
© C. Eppner
Authors
Auguste RodinSources
Website -
1530
-
 © Museum der Burg Jagsthausen
© Museum der Burg Jagsthausen
Authors
Götz von BerlichingenSources
Wikipedia